Претраживање
Приказ резултата 21-30 од 97

Optimal Control and Attenuation of the Oscillating Systems
(Univerzitet u Beogradu, Mašinski fakultet, Katedra za mehanizaciju, 1996)

Brahistohrono ravno kretanje krutog tela
(Beograd : Jugoslovensko društvo za mehanikuUniverzitet u Novom Sadu, FTN, 1994)

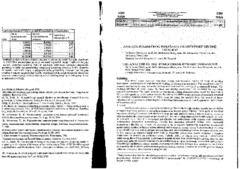
The Analysis of the Tower Crane Dynamic Behaviour
(Beograd : Jugoslovensko društvo za mehaniku, 1997)

Optimalno upravljanje kretanjem krutog tela pri postojanju neholonomne mehaničke veze
(Beograd : Jugoslovensko društvo za mehanikuUniverzitet u Novom Sadu, FTN, 1994)
Аутоматизовано формирање аналитичког облика диференцијалних једначина кретања роботског система са израчунавањем модела у реалном времену
(Kragujevac : Mašinski fakultet, 1992)

Оптимално управљање и реакције веза неслободног механичког система
(Kragujevac : Mašinski fakultet, 1992)
Continual tracking algorithms implementation to naturally non-trackable plants
(Publ by IEEE, Piscataway, NJ, United States, 1993)
A class of linear single control single output plants are considered. In practice plenty of plants have been naturally non-trackable especially `simpler' types. `Simpler' types plants are low order (second or third) with ...

Анализа оптималног управљања кретањем крутих тела у смислу минимизације времена
(Beograd : Jugoslovensko društvo za mehaniku, 1990)